Thiết bị rô bốt xương tay (exoskeleton robot) có hình dáng tương đồng với cánh tay người, có thể đeo được lên cánh tay người và có mô tơ điện hoạt động có thể sinh lực điều khiển để phối hợp cử động của cánh tay người, được nhiều trường đại học trên thế giới phát triển như Trung Quốc, Mỹ. Rô bốt xương tay có hai loại: loại gắn với giá đỡ và loại không có giá đỡ, trong đó giá đỡ được dùng để truyền các lực xuống đất. Rô bốt xương tay có thể áp dụng trong y khoa như phục hồi chức năng cho các bệnh nhân phục hồi tay sau đột quỵ.
Công nghệ cảm nhận thực tế (Virtual Reality) bao gồm mô phỏng theo thời gian thực và tạo ra các cảm nhận thực tế về nghe, nhìn, ngửi, nếm, và lực. Trong các cảm nhận nói trên, phản hồi lực có thể dùng để tạo ra cho người dùng cảm nhận lực. Đề tài đã đề xuất một thiết bị xương tay có thể đeo lên cánh tay người, có thể hoạt động dưới sự điều khiển của tay người để di chuyển theo các phương thẳng đứng Oz và phương ngang Ox, Oy và có khả năng phản hồi lực cho cảm nhận thực tế.
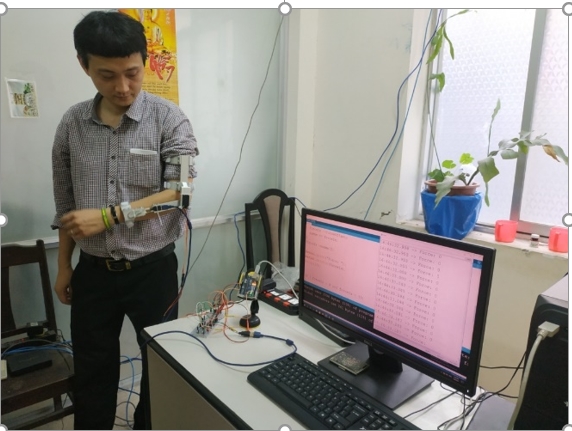
Người dùng đang thực hiện thử nghiệm xương tay hoạt động
Trên hình, là người thiết kế trực tiếp đeo xương tay nên có thể cảm nhận lực tương tác trực tiếp với xương tay. Người thiết kế tác động lực lên xương tay khiến xương tay di chuyển. Thiết bị xương tay sử dụng một cảm biến lực (load cell) đo lực tương tác với người và sử dụng cảm biến góc đo góc quay của động cơ. Thiết bị xương tay có một mô tơ điện hoạt động gắn ở khớp khủy tay để tạo mô men xoắn, được dùng cho hỗ trợ người già khi di chuyển tay. Lực điều khiển cần thiết có thể thay đổi độ lớn theo thuật toán điều khiển hỗ trợ lực bên trong bộ điều khiển.
Rô bốt xương tay được thiết kế bao gồm một cụm khung ngoài bằng kim loại có hình dáng tương đồng với cánh tay người, có tầm với tối đa 400 mm, có tích hợp thêm một cảm biến lực (loadcell 1kg), một cơ cấu chấp hành (mô tơ điện với mô men xoắn cao: 0,8 Nm, sử dụng điện áp thấp (5V), có thể nâng được vật nặng 0,2 (kg), có bộ điều khiển nhúng (embedded controller) sử dụng bộ vi xử lý Atmega328P tốc độ 16 MHz. Bộ điều khiển nhúng có thể kết nối với máy vi tính cá nhân (PC) tốc độ cao để mô phỏng hoạt động của thiết bị theo thời gian thực bao gồm lực tương tác đo được của cảm biến lực, góc quay, vận tốc góc của khớp. Đề tài đã áp dụng bộ điều khiển tỷ lệ - tích phân - vi phân (PID) để điều khiển hoạt động của xương tay. Các tham số của bộ điều khiển được hiệu chỉnh phù hợp nhất để lực tương tác đạt được giá trị mong muốn.
Nhóm nghiên cứu đã tích hợp bộ điều khiển Arduino với cảm biến lực thông qua bộ khuếch đại tín hiệu, cảm biến đo góc xoay (potetialmeter), và động cơ. Sau đó bộ điều khiển Arduino được kết nối với máy tính để lập trình các chương trình điều khiển hoạt động của xương tay.
Trong quá trình lập trình điều khiển rô bốt xương tay, nhóm nghiên cứu đã xây dựng các kịch bản điều khiển lực tương tác giữa xương tay và người đeo. Mục tiêu của điều khiển lực là giảm thiểu sai số giữa lực tương tác mong muốn giữa người với rô bốt xương tay so với giá trị lực phản hồi đo được bởi cảm biến lực tích hợp bên trong xương tay. Lực tương tác mong muốn giữa người và rô bốt xương tay là giá trị đặt trong bộ điều khiển, rô bốt xương tay sinh ra lực để thực hiện mong muốn này. Tiếp đó các kịch bản điều khiển lực đã được xây dựng thành chương trình trên máy tính và chạy thử nghiệm trên bộ điều khiển Arduino.
Thiết bị Rô- bốt xương tay phản hồi lực cho cảm nhận thực tế gồm có thiết bị xương tay, bộ điều khiển nhúng, và máy vi tính cá nhân tốc độ cao.
Đề tài đã nghiên cứu, thiết kế, chế tạo một mô hình xương tay có ba bậc tự do. Đã phân tích động lực học và điều khiển dùng cho mô phỏng hoạt động của hệ xương tay 3 bậc tự do bằng phần mềm chuyên dụng. Đã xây dựng và thử nghiệm một mô hình xương tay có 3 bậc tự do có phản hồi lực cho cảm nhận thực tế. Kết quả có báo cáo ở các hội nghị và tạp chí quốc tế. Để thử nghiệm các kết quả nghiên cứu, nhóm nghiên cứu đã phát triển mô hình xương tay ba bậc tự do nghiên cứu thành thiết bị xương khủy tay có tích hợp các cảm biến lực, bộ vi xử lý, động cơ. Bộ vi xử lý thu thập lực tương tác đo bởi cảm biến lực và điều khiển động cơ để sinh lực hỗ trợ người dùng. Nói một cách ngắn gọn, thiết bị xương tay có thể được lập trình để hỗ trợ thêm lực giúp cho người sử dụng nâng được vật nhẹ, hoặc phục hồi cơ tay theo một chu trình tập luyện đặt trước.
Chu Thị Ngân
Trung tâm Thông tin – Tư liệu
Viện Hàn lâm Khoa học và Công nghệ Việt Nam